 " />
" /> СЊЯЕШЫЃКжгаЁНу
СЊЯЕШЫЃКжгаЁНуЩЯКЃБфЦЕЦїЮЌаоЕчЛАЁЊЁЊЧГЮіИпбЙЭЌВНЕчЛњШЋЪ§зжЛЏЪИСППижЦБфЦЕЦїгІгУЩшМЦ
РДдДЃК ЗЂВМгкЃК2019/5/5 9:39:56 ЕуЛїСПЃК
1 в§бд
ЕчСІЕчзгММЪѕЕФжївЊШЮЮёЮЊЪЕЯжЕчФмЕФзЊЛЛЃЌЫќЕФжївЊбаОПФПБъЪЧНкФмЃЌХЌСІЭкОђвЛЧаЧБдкЕФЬсИпаЇТЪЕФЭООЖЃЌРДНкЪЁгаЯоЕФФмдДЃЌБЃЛЄШЫРрЩњДцЕФЛЗОГЁЃЙІТЪБфЛЛММЪѕе§ЪЧЪЕЯжетвЛФПБъЕФживЊЪжЖЮЃЌЫљвдЫќЪМжеЪЧЕчСІЕчзгбЇЕФКЫаФММЪѕЁЃОЙ§Ш§ЪЎЖрФъЃЌЬиБ№ЪЧНќЪЎЖрФъЕФЗЂеЙЃЌЙІТЪБфЛЛММЪѕвбБШНЯГЩЪьЃЌНќФъРДЕФЗЂеЙЖЏЯђжївЊМЏжадкШэПЊЙиЁЂИпбЙЁЂДѓЙІТЪКЭЕЭбЙЁЂДѓЕчСїБфЛЛММЪѕЗНУцЁЃ
НќФъРДНЛСївьВНЕчЛњЕФЕїЫйгІгУЕУЕННЯПьЕФЗЂеЙЃЌгыНЛСївьВНЕчЛњЯрБШНЯЃЌЭЌВНЕчЛњгазХЯШЬьЕФгХЪЦЃЌвьВНЕчЖЏЛњгЩгкРјДХЕФашвЊЃЌБиаыДгЕчдДЮќШЁжЭКѓЕФЮоЙІЕчСїЃЌПедиЪБЙІТЪвђЪ§КмЕЭЁЃЖјЭЌВНЕчЖЏЛњдђПЩЭЈЙ§ЕїНкзЊзгЕФжБСїРјДХЕчСїЃЌИФБфЪфШыЙІТЪвђЪ§ЃЌПЩвджЭКѓЃЌвВПЩвдГЌЧАЁЃЕБcosІШ=1ЪБЃЌЕчЪрЭЫ№зюаЁЃЌЛЙПЩвдНкдМБфбЙБфЦЕзАжУЕФШнСПЁЃгЩгкЭЌВНЕчЖЏЛњзЊзггаЖРСЂРјДХЃЌдкМЋЕЭЕФЕчдДЦЕТЪЯТвВФмдЫааЃЌвђДЫЃЌдкЭЌбљЬѕМўЯТЃЌЭЌВНЕчЖЏЛњЕФЕїЫйЗЖЮЇБШвьВНЕчЖЏЛњИќПэЁЃвьВНЕчЖЏЛњвЊППМгДѓзЊВюВХФмЬсИпзЊОиЃЌЖјЭЌВНЕчЛњжЛаыМгДѓЙІНЧОЭФмдіДѓзЊОиЃЌЭЌВНЕчЖЏЛњБШвьВНЕчЖЏЛњЖдзЊОиШХЖЏОпгаИќЧПЕФГаЪмФмСІЃЌФмзїГіИќПьЕФЖЏЬЌЯьгІЁЃгЩгкНЛСїЭЌВНЕчЛњдкПЩППадгыЮЌЛЄСПЁЂЙІТЪвђЪ§ЁЂЕчЛњГпДчгызЊЖЏЙпСПЁЂПижЦОЋЖШЁЂШѕДХБШЕШЗНУцгаЦфздЩэЕФгХЪЦЃЌЖдгкДѓШнСПЕчЛњЃЌЪРНчИїЙњвбЛљБОЧїЯђгкЪЙгУЭЌВНЕчЛњЁЃБШШчЙЄвЕгІгУЩЯДѓЙІТЪПеЦјбЙЫѕЛњЁЂЫЎБУЁЂУКЬПгыгаЩЋН№ЪєаавЕжаЕФДѓЙІТЪЬсЩ§ЛњКЭИжГЇДѓШнСПдўИжЛњЕШОљВЩгУЭЌВНЕчЛњЧ§ЖЏЁЃ
НЛСїЭЌВНЕчЛњЕФЕїЫйЪЧЕчЦјЧ§ЖЏСьгђЕФвЛДѓФбЬтЃЌЮвЙњДг20ЪРМЭ70ФъДњПЊЪМНјааНЛСїЭЌВНЕчЛњЕїЫйММЪѕЕФбаОПЃЌ80ФъДњГѕвббажЦГЩЙІНЛЁЊНЛБфЦЕЭЌВНЕчЛњЕФЪЕбщбљЛњЃЌЕЋДѓЙІТЪНЛСїБфЦЕЕїЫйзАжУжБЕН90ФъДњКѓЦкВХЕУЕНЗЂеЙЁЃФПЧАЙњВњДѓЙІТЪБфЦЕзАжУГЩЙІгІгУгкЭЌВНЕчЛњЕФЪЕР§КмЩйЃЌЖМЪЧЙњЭтЦЗХЦвЛЭГЬьЯТЁЃФПЧАЮвЙњДѓаЭЭЌВНЕчЛњгІгУБфЦЕЕїЫйЫфШЛИеИеЦ№ВНЃЌЕЋЙњЭтвбОЙуЗКЪЙгУЁЃЭЈЙ§ЫћУЧГЄЦкЕФдЫааЪЕМљБэУїЃКгІгУИпбЙДѓЙІТЪБфЦЕЕїЫйЯЕЭГЕФОМУаЇвцСМКУЁЂЦфПЩППадвВПЩвдЕУЕНБЃжЄЁЃвђДЫЮвЙњИпбЙЭЌВНЕчЛњБфЦЕЕїЫйзАжУНЋРДЕФЪаГЁЧАОАОоДѓЁЃ
ЙњФкДѓЙІТЪНЛСїЭЌВНЕчЛњДЋЖЏЗНУцЃЌвдНЛ-НЛБфЦЕЕїЫйДЋЖЏЮЊжїЁЃетаЉБфСїЁЂБфЦЕДЋЖЏзАжУЙІТЪДѓЃЌвЛАуЮЊМИАйЧЇЭпжСЪ§ЧЇЧЇЭпЁЃдкЫЎФрЃЌВЩПѓгыПѓЩНаавЕЁЂДЌВАаавЕЁЂвБН№аавЕЁЂЛЏЙЄЃЌЪЏгЭгыЬьШЛЦјаавЕЁЂЕчСІаавЕЁЂжННЌдьжНаавЕЁЂЙЉЫЎгыЮлЫЎДІРэЁЂУКЬПЁЂгаЩЋН№ЪєЕШЬиБ№ЪЧПѓЩНЕФДѓаЭПѓОЎЬсЩ§ЛњДЋЖЏгыЕїЫйЕШСьгђвбгаНЯЖрЕФгІгУЁЃДѓШнСПЁЂЕЭзЊЫйЁЂИпЙ§диЁЂЯьгІПьЁЂЫФЯѓЯодЫааЕШДЋЖЏСьгђжївЊгУгкПѓОЎЬсЩ§ЛњКЭИжЬњГЇЕФжїдўЛњЃЌЖдБфЦЕЦїЕФПижЦвЊЧѓЬиБ№бЯИёЃЌетЪЧЦеЭЈвьВНЕчЛњМАЦфБфЦЕЦїЫљВЛФмНтОіЕФЃЌдкДЫРрЯЕЭГжагІгУЕФДѓЖрЪЧДѓЙІТЪЭЌВНЕчЛњЁЃЮвЙњФПЧАдкИпбЙДѓЙІТЪЭЌВНЕчЛњПижЦЯЕЭГжаВЩгУЕФММЪѕжївЊвдНЛЃНЛПижЦЗНЪНЕФБфЦЕЮЊжїЃЌЛЙгаНЛЃжБЃНЛЗНЪНЃЌНЛЃНЛБфЦЕЦїгЩгкЦфПижЦдРэЗНЪНЕФжЦдМЃЌдьГЩЦфЙІФмКЭгІгУЗЖЮЇЪмЯоЁЃНЛЃНЛБфЦЕЦїЕФНсЙЙЗНЪНАбЕчЭјЦЕТЪЕФНЛСїЕчБфГЩПЩЕїЦЕТЪЕФНЛСїЕчЃЌЪєгкжБНгБфЦЕЕчТЗЃЌЙуЗКгУгкДѓЙІТЪНЛСїЕчЖЏЛњЕїЫйДЋЖЏЯЕЭГЁЃИФБфЧаЛЛЦЕТЪЃЌОЭПЩИФБфЪфГіЦЕТЪЃЛИФБфНЛСїЕчТЗЕФЕМЭЈНЧЃЌОЭПЩвдИФБфНЛСїЪфГіЕчбЙЗљжЕЃЛЪфГіЦЕТЪдіИпЪБЃЌЪфГіЕчбЙвЛжмЦкЫљКЌЕчЭјЕчбЙЖЮЪ§МѕЩйЃЌВЈаЮЛћБфбЯжиЃЌЕчбЙВЈаЮЛћБфМАЦфЕМжТЕФЕчСїВЈаЮЛћБфКЭзЊОиТіЖЏЪЧЯожЦЪфГіЦЕТЪЬсИпЕФжївЊвђЫиЁЃЪфГіВЈаЮЛћБфКЭЪфГіЩЯЯоЦЕТЪЕФЙиЯЕЃЌКмФбШЗЖЈУїШЗНчЯоЁЃР§ЕБВЩгУ6ТіВЈШ§ЯрЧХЪНЕчТЗЪБЃЌЪфГіЩЯЯоЦЕТЪВЛИпгкЕчЭјЦЕТЪЕФ1/3ЁЋ1/2ЁЃЕчЭјЦЕТЪЮЊ50hzЪБЃЌНЛЃНЛБфЦЕЕчТЗЕФЪфГіЩЯЯоЦЕТЪдМЮЊ20hzЁЃ
ЛЙгавЛжжБфЦЕЦїЪЧНЛ-жБ-НЛаЭИпбЙБфЦЕЦїЃЌетжжБфЦЕЦїЕФЧ§ЖЏИпбЙЭЌВНЕчЛњЕФЗНЪНФПЧАвдv/fПижЦЮЊжїЃЌетжжЗНЪНдквЛаЉЖдЕїЫйБШвЊЧѓВЛИпЃЌЖЏЬЌЯьгІЕЭЕФГЁКЯЪЪгУЃЌЫќЕФПижЦЗНЪНЪЧВЩгУвьВНЕчЛњЕФПижЦВпТдЃЌЦєЖЏЙ§ГЬЃКИпбЙЭЌВНЕчЛњЯШНјаавьВНБфЦЕЦєЖЏЃЌЕШзЊЫйНгНќЭЌВНзЊЫйЪБЃЌдйЖдзЊзгЭЖШыРјДХЕчСїЃЌЪЙЯЕЭГНјШыЭЌВНзЊЫйдЫааЁЃетжжПижЦЗНЪНЕФШБЕуЪЧЃЌЯьгІТ§ЃЌЕїЫйБШаЁЃЌ ВЛФмЗЂЛгЭЌВНЕчЛњЕФЬиГЄЃЌВЛФмЪЕЯжЫФЯѓЯодЫааЃЌИпбЙЭЌВНЕчЛњЪфГіЕФзЊОиЕЭЃЌЦ№ЖЏЕчСїДѓЃЌШнвзЪЇВНЃЌетжжБфЦЕЦїжЛФмгУгкИКдиНЯЧсЃЌИКдиБфЛЏВЛДѓЕФГЁКЯЁЃ
ЫцзХЮЂЕчзгММЪѕЕФЗЂеЙКЭгІгУЃЌМЦЫуЛњгУгкПижЦЃЌЪЙНЛСїБфЦЕПижЦЯЕЭГгЩФЃФтЪННјШыЪ§ФЃЛьКЯЪНЃЌНјвЛВНЗЂеЙЕНШЋЪ§зжЪНЃЌЪЕЯжПижЦЗНАИКЭПижЦВпТдЕФШэМўЛЏЃЌдкПижЦЯЕЭГШЋЪ§зжЛЏЕФЧщПіЯТЃЌгЩгкИФБфШэМўМДПЩИФБфПижЦФЃЪНКЭВЮЪ§ЃЌетОЭДѓДѓЬсИпСЫЯЕЭГЕФЭЈгУадКЭСщЛюадЃЌМђЛЏСЫЯЕЭГЕФгВМўНсЙЙЃЌВЂПЩВЩгУвЛаЉЛљгкЯжДњПижЦРэТлЕФПижЦЫуЗЈРДЬсИпЯЕЭГЕФадФмЁЃИќживЊЕФЪЧЃЌЫцзХЯжДњЭЈаХММЪѕЁЂдЖГЬПижЦММЪѕЁЂзмЯпММЪѕКЭздЖЏЛЏММЪѕЕФЗЂеЙЃЌШЋЪ§зжЗНЪНЪЧЮДРДЗЂеЙЕФБиШЛЧїЪЦЁЃвђДЫШЋЪ§зжЛЏНЛ-жБ-НЛДѓЙІТЪЭЌВНЕчЛњЪИСППижЦЦїЕФгІгУЪЧЮДРДгІгУЕФЗНЯђЃЌетЗНУцдкЮвЙњЕФгІгУКЭбаОПЛЙЪЧПеАзЃЌБфЦЕЕїећПижЦЗНЗЈЕФНјеЙжївЊЬхЯждкгЩдчЦкЕФОВЬЌПижЦЗНЪНЯђИпЖЏЬЌадФмЕФЫФЯѓЯодЫааЕФЪИСППижЦЗЂеЙЃЌВЩгУетжжПижЦЗНЪНПЩвдгааЇЕиНтОіИпбЙЭЌВНЕчЛњЕФЖЏЬЌЯьгІЁЂЕїЫйБШПэЕШвЊЧѓЃЌЯЕЭГПЩвдКузЊОиЪфГіЁЃ
2 ШЋЪ§зжЛЏЪИСППижЦЗНЪНММЪѕЗНАИЕФдРэ
2.1ММЪѕЗНАИЯъЯИВћЪі
МјгкЯжгаММЪѕШБЕуЃЌКЭвЊЪЕЯжЕФММЪѕФПЕФЃЌЮвУЧвЊЪЕЯжЕФИпбЙЭЌВНЕчЛњЪИСППижЦБфЦЕЦїЕФЪЕЯжгЩвдЯТММЪѕЬиЕуКЭЕЅдЊзщГЩЃЌШ§ЯрИпбЙЕчЪфШывЦЯрИєРыБфбЙЦїЃЌОвЦЯрИєРыНЕбЙЖрТЗНЛСїЪфГіКѓЃЌЪфШыЕНДјФмСПЛиРЁЕФЙІТЪЕЅдЊigbtећСїВЂТЫВЈГЩжБСїдйОigbtФцБфЪфГіЕНЭЌВНЕчЛњЃЛЕчЛњЕФЮЛжУЫйЖШДЋИаЦїЗДРЁЕФаХКХОИпЫйДЎааБрТыДЋЪфЗНЪНДЋЫЭИјжїПиАхЕФfpgaНјааНтТыДІРэКѓЃЌЫЭИјdspНјааЪ§ОндЫЫуДІРэЃЛЕчСїЗДРЁОЛєЖћДЋИаЦїВЩбљЃЌЩЯДЋаХКХАхОФЃФтаХКХДІРэЕчТЗТЫВЈДІРэКѓдйЩЯДЋИјdspжїПиАхЕФadВЩбљВЂдЫЫуЃЛжїПиАхгыЩЯЮЛЛњЕФШЫЛњНчУцНјааЪЕЪБЪ§ОнЭЈаХЃЌВЂЩЯБЈЯЕЭГЕФИїЯюдЫааВЮЪ§КЭЙЪеЯзДЬЌЃЛЪфШыЪфГіаХКХЕЅдЊАхгыжїПижЦЦїНјааЭЈбИЃЌДІРэЭтВПЪфШыЪфГіаХКХЕФПижЦЙІФмЃЛЯЕЭГЕФдРэШчЭМ1ЫљЪОЁЃ
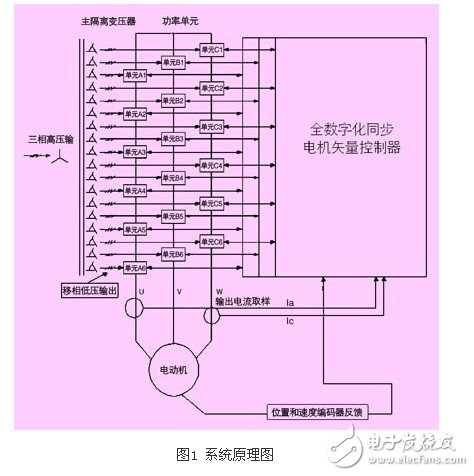
ЃЉ
2.2НЛ-жБ-НЛЕЅдЊДЎСЊЖрЕчЦНЗНЪН
ЯждкЙњФкЕФЭЌВНЕчЛњБфЦЕЦїЃЌДѓВПЗжВЩгУЕФЪЧНЛ-НЛБфЦЕЃЌКЭНЛ-жБ-НЛБфЦЕЦїЯрБШЃЌШБЕуЃКЧ§ЖЏОЇеЂЙмИДдгЃЛЪфГіЦЕТЪЗЖЮЇЕЭЃЌжЛФмДяЕНЕчЭјЦЕТЪЕУ1/3дЫааЃЛЙІТЪвђЪ§ЕЭЃЌаГВЈЮлШОбЯжиЁЃдквЛаЉПижЦГЁКЯЃЌНЛ-НЛБфЦЕЦїЕФдРэДјРДСЫЫќдкИпЫйЩЯЕФгІгУВЛФмЪЕЯжКЭЖЏЬЌЯьгІТ§ЕФШБЕуЁЃ
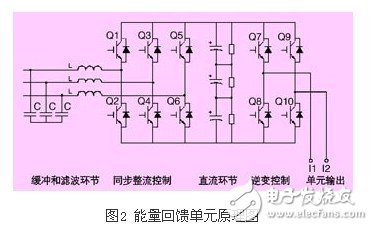
НЛ-жБ-НЛЗНЪНЪЙгУвЦЯрЕФФПЕФПЩвдЬсИпећСїЩшБИЕФТіВЈЪ§ЃЌМѕаЁЭјВрИпДЮаГВЈЃЌећСїБфбЙЦїВЩгУЖўДЮВрбгБпШ§НЧаЮвЦЯрЃЌНЛ-жБ-НЛЗНЪНЦЕТЪЕїЫйЗЖЮЇПэЃЌЙІТЪБфЛЛЕчТЗВЩгУЖрЕчЦНБфЛЛЦїЃЌШчЭМ2ЫљЪОЃЌИїМЖЙІТЪФЃПщОљВЩгУhШЋЧХigbtЧ§ЖЏЗНЪНЃЌгЩгкЪфГіЕчЦНЪ§НЯЖрЃЌЪфГіВЈаЮНзЬндіЖрЃЌОЭПЩвдЪЙЕїжЦВЈНгНќе§ЯвЃЌНЕЕЭЕчбЙЬјБфЃЌетбљаГВЈОЭЩйЁЃСэвЛИігХЕуЪЧЪфГіЕчбЙЕФdv/dtНЯаЁЃЌЖдИКдиЕчЛњЕФГхЛїаЁЁЃШчвЛаЉдўИжЛњЃЌЬсЩ§ЛњЃЌОэбяЛњЁЃШчЙћВЩгУНЛ-НЛБфЦЕЃЌБиаыМгМѕЫйЛњЙЙЁЃЖјНЛ-жБ-НЛБфЦЕЦїПЩвддкЩшБИаэПЩЕФЗЖЮЇФкЃЌЦфЦЕТЪШЮвтЕїНкЃЌетОЭНтОіСЫЩЯЪіЮЪЬтЁЃ
2.3ЛљгкФмСПЛиРЁЕФЙІТЪЕЅдЊ
ЦеЭЈИпбЙБфЦЕЦїВЛФмжБНггУгкашвЊПьЫйЦ№ЁЂжЦЖЏКЭЦЕЗБе§ЁЂЗДзЊЕФЕїЫйЯЕЭГЃЌШчИпЫйЕчЬнЁЂПѓгУЬсЩ§ЛњЁЂдўИжЛњЁЂДѓаЭСњУХХйДВЁЂОэШЦЛњЙЙеХСІЯЕЭГМАЛњДВжїжсЧ§ЖЏЯЕЭГЕШЁЃвђЮЊетжжЯЕЭГвЊЧѓЕчЛњЫФЯѓЯодЫааЃЌЕБЕчЛњМѕЫйЁЂжЦЖЏЛђепДјЮЛФмадИКдижиЮяЯТЗХЪБЃЌЕчЛњДІгкдйЩњЗЂЕчзДЬЌЁЃгЩгкЖўМЋЙмВЛПиећСїЦїФмСПДЋЪфВЛПЩФцЃЌВњЩњЕФдйЩњЕчФмДЋЪфЕНжБСїВрТЫВЈЕчШнЩЯЃЌВњЩњБУЩ§ЕчбЙЁЃЖјвдgtrЁЂigbtЮЊДњБэЕФШЋПиаЭЦїМўФЭбЙНЯЕЭЃЌЙ§ИпЕФБУЩ§ЕчбЙгаПЩФмЫ№ЛЕПЊЙиЦїМўЁЂЕчНтЕчШнЃЌЩѕжСЛсЦЦЛЕЕчЛњЕФОјдЕЃЌДгЖјЭўаВЯЕЭГАВШЋЙЄзїЃЌетОЭЯожЦСЫЦеЭЈИпбЙБфЦЕЦїЕФгІгУЗЖЮЇЃЌЖјЛљгкФмСПЗДРЁЕФЯЕЭГНтОіСЫЩЯЪіЮЪЬтЃЌВЂЧвЪЕЯжСЫеце§ЕФНкФмФПБъЖјВЛЪЧРЫЗбЕєФмСПЁЃ
ДјФмСПЛиРЁЕФЙІТЪЕЅдЊЃЌЪфШыЮЊвЦЯрИєРыБфбЙЦїИББпНЕбЙШЦзщЕФШ§ЯрЃЌigbtЕФПижЦаХКХЮЊОЙтЯЫДЋЪфЙ§РДЕФpwmаХКХПижЦЦфЕМЭЈКЭЙиЖЯЃЌЪфГіОЕЅдЊДЎСЊКѓЕНЕчЛњЁЃдРэЭМШчЭМ2ЫљЪОЁЃ
2.4Ъ§зжЪИСППижЦЗНЪН
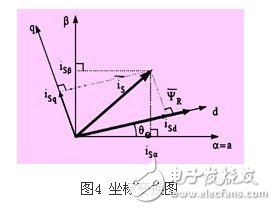
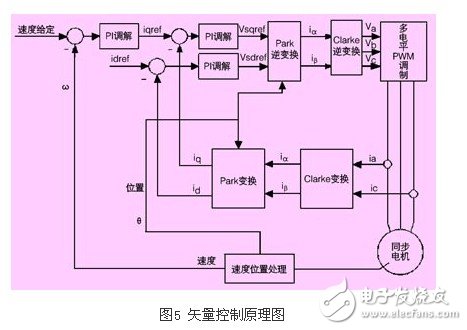
ЪИСППижЦЕФФПЕФЪЧЮЊСЫИФЩЦзЊОиПижЦадФмЃЌЖјзюжеЪЕЪЉШдШЛЪЧЖдЖЈзгЕчСїЕФПижЦЁЃгЩгкдкЖЈзгВрЕФИїЮяРэСПЃЈЕчбЙЁЂЕчСїЁЂЕчЖЏЪЦЁЂДХЖЏЪЦЃЉЖМЪЧНЛСїСПЃЌЦфПеМфЪИСПдкПеМфвдЭЌВНзЊЫйа§зЊЃЌЕїНкЁЂПижЦКЭМЦЫуОљВЛЗНБуЁЃвђДЫЃЌашНшжњгкзјБъБфЛЛЃЌЪЙИїЮяРэСПДгОВжЙзјБъЯЕзЊЛЛЕНЭЌВНа§зЊзјБъЯЕЃЌеОдкЭЌВНа§зЊЕФзјБъЯЕЩЯЙлВьЃЌЕчЖЏЛњЕФИїПеМфЪИСПЖМБфГЩСЫОВжЙЪИСПЃЌдкЭЌВНзјБъЯЕЩЯЕФИїПеМфЪИСПОЭЖМБфГЩСЫжБСїСПЃЌПЩвдИљОнзЊОиЙЋЪНЕФМИжжаЮЪНЃЌевЕНзЊОиКЭБЛПиЪИСПЕФИїЗжСПжЎМфЕФЙиЯЕЃЌЪЕЪБЕиМЦЫуГізЊОиПижЦЫљашЕФБЛПиЪИСПЕФИїЗжСПжЕЁЊЁЊжБСїИјЖЈСПЁЃАДетаЉИјЖЈСПЪЕЪБПижЦЃЌОЭФмДяЕНжБСїЕчЖЏЛњЕФПижЦадФмЁЃгЩгкетаЉжБСїИјЖЈСПдкЮяРэЩЯЪЧВЛДцдкЕФЃЌЪЧащЙЙЕФЃЌвђДЫЃЌЛЙБиаыдйОЙ§зјБъЕФФцБфЛЛЙ§ГЬЃЌДга§зЊзјБъЯЕЛиЕНОВжЙзјБъЯЕЃЌАбЩЯЪіЕФжБСїИјЖЈСПБфЛЛГЩЪЕМЪЕФНЛСїИјЖЈСПЃЌдкШ§ЯрЖЈзгзјБъЯЕЩЯЖдНЛСїСПНјааПижЦЃЌЪЙЦфЪЕМЪжЕЕШгкИјЖЈжЕЁЃдкЪИСПБфЛЛЕФПижЦЗНЗЈжаЃЌашгУЕНОВжЙКЭа§зЊЕФзјБъЯЕЃЌвдМАЪИСПдкИїзјБъЯЕжЎМфЕФБфЛЛЃЌНЛСїЭЌВНЕчЛњЕФЪИСППижЦЃЌашвЊАбЕчЛњЕФabcШ§ЯрЖЈзгОВжЙзјБъЯЕЕФЕчСїiaЁЂibЁЂicЁЂБфЛЛГЩІСКЭІТСНЯрОВжЙзјБъЯЕЃЈclarkeБфЛЛЃЉЃЌвВНаШ§ЯрЃЖўЯрБфЛЛЃЌдйДгСНЯрОВжЙзјБъЯЕБфЛЛГЩЭЌВНа§зЊДХГЁЖЈЯђзјБъЯЕЃЈparkБфЛЛЃЉЃЌЕШаЇГЩЭЌВНа§зЊзјБъЯЕЯТЕФжБСїЕчСїiqЁЂidЃЈidЯрЕБгкжБСїЕчЖЏЛњЕФРјДХЕчСїЃЛiqЯрЕБгкгызЊОиГЩе§БШЕФЕчЪрЕчСїЃЉЃЌШЛКѓФЃЗТжБСїЕчЖЏЛњЕФПижЦЗНЗЈЃЌЧѓЕУжБСїЕчЖЏЛњЕФПижЦСПЃЌОЙ§ЯргІЕФзјБъФцБфЛЛЃЈparkФцБфЛЛЃЉЃЈclarkeФцБфЛЛЃЉЃЌЪЕЯжЖдЭЌВНЕчЖЏЛњЕФПижЦЁЃЦфЪЕжЪЪЧНЋНЛСїЕчЖЏЛњЕШаЇЮЊжБСїЕчЖЏЛњЃЌЗжБ№ЖдЫйЖШЃЌДХГЁСНИіЗжСПНјааЖРСЂПижЦЁЃЭЈЙ§ПижЦзЊзгДХСДЃЌШЛКѓЗжНтЖЈзгЕчСїЖјЛёЕУзЊОиКЭДХГЁСНИіЗжСПЃЌОзјБъБфЛЛЃЌЪЕЯже§НЛНтёюПижЦЁЃ
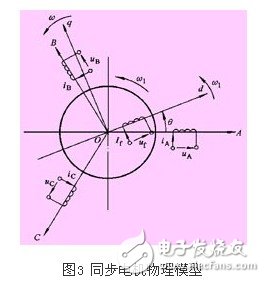
ШчЭМ3ЫљЪОЃЌЖўМЋЭЌВНЕчЛњЕФЮяРэФЃаЭЃЌЖЈзгШ§ЯрШЦзщжсЯпaЁЂbЁЂcЪЧОВжЙЕФЃЌШ§ЯрЕчбЙuaЁЂubЁЂucКЭШ§ЯрЕчСїiaЁЂibЁЂicЖМЪЧЦНКтЕФЃЌзЊзгвдЭЌВНзЊЫйІи1а§зЊЃЌзЊзгЩЯЕФРјДХШЦзщдкРјДХЕчбЙufЙЉЕчЯТСїЙ§РјДХЕчСїifЁЃбиРјДХДХМЋЕФжсЯпЮЊdжсЃЌгыdжсе§НЛЕФЪЧqжсЃЌd-qзјБъдкПеМфвВвдЭЌВНзЊЫйІи1а§зЊЃЌdжсгыaжсжЎМфЕФМаНЧІШЮЊБфСПЁЃ
Ш§ЯрЖЈзгШЦзщОВжЙЕчЦјЗНГЬЃК

ЭЌВНЕчЛњВЩгУИФНјЕФПеМфЪИСПДХГЁЖЈЯђПижЦВпТдЃЌПижЦЯЕЭГВЩгУЫйЖШЛЗКЭЕчСїЛЗЫЋБеЛЗНсЙЙЃЌЕчСїЛЗВЩгУpiЕїНкЦїЃЌЪЕЯжМђЕЅЃЌВЂФмЛёЕУНЯКУЕФЕчСїИњзйадФмЁЃЫйЖШЛЗВЩгУpiЕїНкЦїЃЌФмгааЇЕиЯожЦЖЏЬЌЯьгІЕФГЌЕїСПЃЌМгПьЯьгІЫйЖШЁЃЯЕЭГВЩгУзЊЫйЁЂЕчСїЫЋБеЛЗЕїЫйЯЕЭГЃЛЯЕЭГШЋЪ§зжЪНЕФЙиМќЪЧЕчСїЛЗЪ§зжЛЏЃЌОЭЪЧАбЪ§ФЃЛьКЯЪНБфЦЕЯЕЭГжаЕФФЃФтЕчСїЛЗЃЌВЩгУЪ§зжЗНЪНМгвдЪЕЯжЃЌЦфКЫаФЪЧЬсИпЕчСїЛЗЕФДІРэЫйЖШЃЌДяЕНЛђНгНќФЃФтЕчСїЛЗЕФЯьгІЫйЖШЁЃИљОнФПЧАЕФЮЂДІРэЦїdspЁЂa/dЦїМўЕФЫЎЦНЃЌПЩвдТњзугВМўЕФашвЊЃЛСэвЛЗНУцдкгкПижЦВпТдМАПижЦШэМўЕФгХЛЏЁЃСМКУЕФЯЕЭГгВМўКЭШэМўЩшМЦЪЧЪЙбажЦЕФЯЕЭГДяЕНЪЕгУЛЏЕФБЃжЄЃЌдкТњзуадФмвЊЧѓЕФЛљДЁЩЯЃЌБиаыГфЗжРћгУгВМўзЪдДЃЌЬсИпМЏГЩЖШЃЌНЕЕЭгВМўГЩБОЃЌДяЕНВњЦЗЛЏЕФФПБъЁЃ
ЪИСППижЦЯЕЭГЕФНтёюЃЌЫйЖШИјЖЈІигыЫйЖШЗДРЁЯрМѕЕУГіЫйЖШЮѓВюЃЌЫйЖШЮѓВюОpiЕїНкКѓЪфГізЊОиЕчСїИјЖЈЃЌiqЃЌidРјДХЕчСїИјЖЈЪЧИљОнЯЕЭГЕФЖЏЬЌашвЊНјааЕїећЃЌЦфжЕИљОнВЛЭЌЕФЕчЛњКЭИКдиЕУГіЕФОбщжЕЁЃЕчЛњШ§ЯрЕчСїЗДРЁiaЁЂicЁЂibОДЋИаЦїВЩбљЃЌШЛКѓдйИљОнзЊзгЮЛжУЕчЦјНЧЖШІШНјааclarkeБфЛЛЃЌБфЛЛКѓЪфГіiІСЁЂiІТЃЌiІСЁЂiІТОparkБфЛЛЪфГіidЁЂiqЃЌ idЁЂiqжЕгыИјЖЈжЕiqrefЁЂidrefЧѓЮѓВюЃЌНјааpiЕїНкКѓЪфГіvqЁЂvdЃЌЕчбЙЪИСПКЭзЊзгЮЛжУЕчЦјНЧЖШІШОЙ§parkФцБфЛЛЃЌclarkeФцБфЛЛЃЌЪфГіЕчЛњЖЈзгШ§ЯрЕчбЙvaЁЂvbЁЂvcжЕЃЌШ§ЯрЕчбЙvaЁЂvbЁЂvcжЕзїЮЊpwmЃЈТіПэЕїжЦЃЉЕФБШНЯжЕБШНЯЃЌЪфГіpwmВЈаЮЕНФцБфЦїШЛКѓЧ§ЖЏЕчЛња§зЊЁЃ
ећИіЯЕЭГЕФПижЦдРэПђЭМШчЭМ5ЫљЪОЁЃ
БОЗНАИЕФЭЌВНЕчЛњЕФРјДХЕчСїЪЧifЪЧАДееЙЬЖЈРјДХЕчСїИјЖЈЗНЪНЙЄзїЁЃЖдгкЭЌВНЕчЛњЕФзЊзгРјДХЕчСїifЕФИјЖЈЃЌЭЈЙ§ЖдЭЌВНЕчЛњЕФПедиЬиадЪдбщКЭЖЬТЗЪЕбщЃЌВтГіЕчЛњЕФИїЯюВЮЪ§ВЂМЦЫуГіЫљашдЫааЕФЖюЖЈРјДХЕчСїЃЌДЫЪБИљОнЖюЖЈЕФРјДХЕчСїifЕїНкЖЈзгВрЕФШЅДХЕчСїidrefОЭПЩвдЕїНкЯЕЭГЕФЙІТЪвђЪ§ЃЌЙІТЪвђЪ§НЧІФ=arctanЃЈiqЃЉ/ЃЈidЃЉЃЌПижЦidrefОЭПЩвдЪЙЕУЯЕЭГЪЧдЫаадкЙІТЪвђЪ§ГЌЧАЛЙЪЧжЭКѓЁЃ
2.5гВМўжїПиЪЕЯжВПЗж
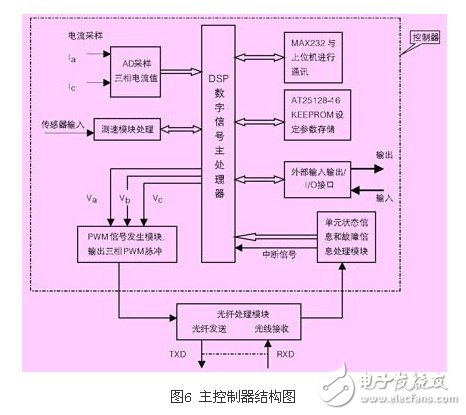
ЯЕЭГЕФШэгВМўПижЦШчЭМ6ЫљЪОЃЌгЩdspЪ§зжаХКХДІРэЦїзїЮЊжїПиcpuЃЌПЩБрГЬТпМЦїМўЪЕЯжВПЗжЫуЗЈЕФМЦЫуКЭВЈаЮЗЂЩњМАИїжжаХКХЕФДІРэЃЌadВЩбљДІРэЕчСїЕчбЙЗДРЁаХКХВЂДЋЕНdspЃЌЕЅдЊгыжїПиАхcpuЕФЭЈаХВЩгУЙтЯЫДЎааИпЫйЭЈаХЗНЪНЃЌЕЅдЊЕФзДЬЌаХЯЂОПЩБрГЬТпМЦїМўНјааДЎааБрТыКѓЭЈЙ§ЙтЯЫЗЂЫЭЕНжїПижЦЦїЕФНгЪеАхЃЌжїПижЦЦїНгЪеАхНјааДЎааЕНВЂааНтТыКѓДЋЪфЕНжїПиcpuЃЛжїПиcpuИљОнЕЅдЊЕФзДЬЌаХЯЂЃЌЕїећЯЕЭГЕФПижЦзДЬЌЃЛЫйЖШгыЮЛжУДЋИаЦїЕФаХКХОДЋИаЦїАхЁЂПЩБрГЬТпМЦїМўНјааДЎааБрТыКѓЃЌОИпЫйДЎааДЋЪфЕНжїПиЦїАхЕФПЩБрГЬТпМЦїМўЃЌПЩБрГЬТпМЦїМўЖдДЋИаЦїЗДРЁЕФЫйЖШЮЛжУаХКХНјаадЫЫуДІРэЃЌВтЫйЗНЪНВЩгУБфm/tВтЫйЃЌПЩвдЪЕЯжИпОЋЖШЕФВтЫйвЊЧѓЃЌПЩБрГЬТпМЦїМўМЦЫуГіЫйЖШКЭЮЛжУЕФгааЇжЕЃЌВЂЖдДЋИаЦїМьВтгаЮоЙЪеЯзДЬЌЃЌЩЯБЈжїПиcpuЃЌЭЌЪБжїПиcpuПЩвдИљОнВтЫйЕФвЊЧѓЖЏЬЌЕїећВтЫйЗНЪНКЭЪБМфЃЛБОЯЕЭГжаЕФЕчСїМьВтдЊМўбЁдёСЫИљОнДХГЁВЙГЅдРэжЦГЩЕФЛєЖћаЇгІЕчСїЛЅИаЦїЃЌвдТњзуЪЕЪБМрВтЕчСїЕФвЊЧѓЃЌЕчЛњЕФШ§ЯрЕчСїКЭЕчбЙаХКХОаХКХДІРэЕчТЗДІРэКѓЃЌБфГЩФЃФтЕчбЙаХКХЪфШыЕНжїПиАхЕФadзЊЛЛаОЦЌЃЌИУadаОЦЌПЩвддкЫВЪБЧщПіЯТЖдШ§ЯрЕФЕчбЙЕчСїаХКХНјааВЩбљБЃГжВЂзЊЛЛЃЌетбљФмБЃжЄецЪЕЕФдйЯжЕчЛњЫВЬЌШ§ЯрЕчбЙЕчСїЕФВЈаЮЃЌadзЊЛЛаОЦЌВЩбљЭъГЩКѓЩЯДЋШ§ЯрЕФЪ§ОнЃЛжїПижЦcpuгыЩЯЮЛЯЕЭГВЩгУЕФЪЧrs-232ЭЈбЖФЃЪНЃЌЪЕЪБЕиНгЪеЩЯЮЛЛњИјЖЈЕФИїЯюВЮЪ§ЩшЖЈжЕЃЌВЂЩЯБЈећИіЯЕЭГЕФдЫаазДЬЌКЭИїЯюЪ§ОнЃЛЯЕЭГЕФЭтВПi/oЪфШыЪфГіОИєРыДЋЪфЕНжїПиcpuЕФi/oПкЃЌжїПиcpuИљОнПижЦвЊЧѓзїГіЯргІЕФжДааПижЦЃЛat25128ЪЧДЎааeepromгыжїПиcpuЭЈаХВЩгУspiЗНЪНЃЌeepromжївЊЦ№зХБЃДцЩЯЮЛЯЕЭГИїЯюЩшЖЈВЮЪ§жЕКЭДцДЂЯЕЭГЕФвЛаЉдЫаазДЬЌаХЯЂЃЛжїПиcpuВЩгУЕФЪЧdspЫќЪЧtiЙЋЫОc2000ЯЕСаЕФtms320lf2407aЃЌdspЪЧвЛжжИпЫйЕФЮЂДІРэЦїЃЌЦфзюДѓЬиЕуЪЧдЫЫуЫйЖШПьЃЌБШФПЧА16/32ЮЛЮЂДІРэЦїКЭЕЅЦЌЛњЕФдЫЫуЫйЖШжСЩйПьвЛИіЪ§СПМЖЃЌdspетжжИпдЫЫуДІРэФмСІФмЙЛТњзуЕчСїЛЗЪЕЪБПижЦЕФИпвЊЧѓЃЌПЩвдЭЌЪБЖдЕчЛњЕФзЊзгЮЛжУКЭЫйЖШНјааБцЪЖвдЪЕЯжЮоЫйЖШДЋИаЦїЪИСППижЦвЊЧѓЃЌВЂЧвПЩвдВЩгУЯШНјЕФЯжДњПижЦВпТдЃЌЛёЕУИќИпЕФПижЦадФмЃЌИќЭъЩЦЕФЙІФмЃЛећИігВМўЕФдРэПђЭМШчЭМ6ЫљЪОЁЃ
2.6ПЩБрГЬТпМЦїМўЕФЪЕЯждРэ
ЕЅдЊФЃПщгыжїПижЦЦїЕФЭЈбЖВЩгУЙтЯЫДЎааИпЫйЭЈбЖФЃЪНЃЌЦфЭЈбЖЫйТЪЮЊ4mhzЃЌетбљПЩвдТњзуЪЕЪБПижЦвЊЧѓЃЌУПИіФЃПщгыжїПижЦАхЭЈбЖВЩгУЫЋЙЄФЃЪНЃЌПЩБрГЬТпМЦїМўЗЂГіЕФpwmВЈаЮаХКХОБрТыКѓВЂДЎзЊЛЛЃЌЭЈЙ§ЙтЯЫЧ§ЖЏЗЂЫЭЕНЕЅдЊФЃПщЃЌЭЌЪБПЩБрГЬТпМЦїМўНгЪеЕЅдЊЕФДЎааБрТыНјааДЎВЂзЊЛЛЃЌАбЕЅдЊЕФзДЬЌаХЯЂКЭЙЪеЯаХКХвджаЖЯЗНЪНЩЯДЋИјжїПиdspЃЌОпЬхШчЭМ7ЫљЪОЁЃ
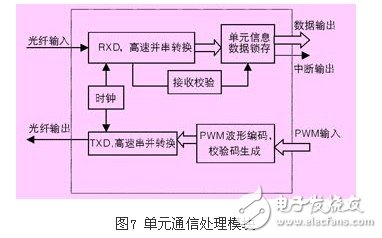
ДЋИаЦїаХКХЕФВтЫйЃЌЖдДЎааЪфШыЕФБрТыНјааНтТыЪфГіЕчЛњзЊзгЕФЮЛжУаХКХЪ§ОнЃЌИљОнДЋИаЦїЕФзЊЫйТіГхаХКХНјааВтЫйЃЌВтЫйЗНЪНВЩгУБфm/tВтЫйЃЌИљОнВтЫйЕФmжЕгыtжЕНјааЪ§ОндЫЫуЕУГізЊзгЕФзЊЫйЁЃгЩгкВЩгУСЫПЩБрГЬТпМЦїМўгВМўТпМВтЫйЗНЪНЃЌЪЙЕУВтЫйЗЖЮЇКмПэКЭОЋЖШКмИпЃЌФмЙЛТњзуЯЕЭГОЋЖШвЊЧѓЁЃ
pwmаХКХЩњГЩЃЌИљОнdspдЫЫуЪфГіЕФЕФЪ§ОнПЩБрГЬТпМЦїМўгУИпЫйЪБжгЩњГЩЪ§ОнЃЌВЂНјааЕЅдЊДЎСЊЕФpwmВЈаЮвЦЯрЃЌЪфГіЕНЙтЯЫЗЂЫЭФЃПщЁЃ
гЩгкЯЕЭГВЩгУШЋЪ§зжЛЏПижЦЗНЪНЃЌЫљгаЕФПижЦВпТдШЋгЩШэМўБрГЬРДЪЕЯжЃЌвђЖјЃЌШэМўЕФЩшМЦОіЖЈзХећИіЯЕЭГЕФадФмЁЃПижЦВпТдВЩгУзЊЫйЁЂЕчСїЫЋБеЛЗЯЕЭГЃЌЦфжазЊЫйЛЗВЩгУpiЕїНкЁЂЕчСїЛЗВЩгУpiЕїНкЃЌЫуЗЈгЩdspЪ§зжаХКХДІРэЦїШэМўБрГЬЪЕЯжЁЃЫйЖШЛЗЕФЪфШыЪЧЫйЖШЗДРЁКЭЫйЖШИјЖЈЕФВюжЕЃЌЪфГізїЮЊЕчСїЛЗЕФИјЖЈЁЃЕчСїЛЗЕФЪфГіРДПижЦpwmВЈаЮЩњГЩЦїЃЌЫљЩњГЩЕФpwmВЈаЮПижЦФцБфЦїжаЙІТЪПЊЙиЦїМўЕФЭЈЖЯЃЌвдЪЕЯжЖдЕчЛњЕФЕїЫйЁЃећИіШэМўДІРэЯЕЭГВЩгУЧАКѓЬЈДІРэФЃЪНЃЌГЬађЕФжаЖЯЗўЮёВЩгУЧЖЬзДІРэЕФаЮЪНЃЌвдБЃжЄећИіЯЕЭГЪЕЪБаХКХЕФДІРэЃЌжаЖЯдДга4жжЃЌАќРЈЯЕЭГБЃЛЄжаЖЯЃЌЦЌФкЕчСїЛЗЖЈЪБДІРэжаЖЯЃЌЫйЖШЛЗЖЈЪБДІРэжаЖЯЃЌЭтВПЭЈбЖжаЖЯЁЃ
ШэМўЯЕЭГЩЯЕчНјааГѕЪМЛЏЃЌЙижаЖЯЧхИїжжБъжОЮЛЃЌХфжУdspЕФИїИіЭтЩшФЃПщКЭi/oПкЃЌЖСШЁeepromжаЕФВЮЪ§аХЯЂЃЌМЦЫуЕчЛњЕФЮЛжУаХКХКЭЕчНЧЖШЃЌбгЪБМьВтИпбЙЩЯЕчЗёЃПНјШыЯЕЭГжїбЛЗЁЃ
ЯЕЭГБЃЛЄжаЖЯЃЌМьВтЕЅдЊФЃПщЕФЙЪеЯзДЬЌКЭЯЕЭГЕФБЃЛЄжаЖЯЃЌдкГіЯжЙ§СїЁЂЙ§бЙЁЂplcЕШЙЪеЯЪБЃЌЯЕЭГЙиЖЯigbtЕФЪфГіВЂЭЃЛњЩЯБЈЯЕЭГЕФЙЪеЯаХЯЂЁЃ
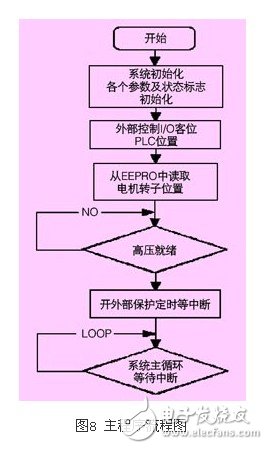
ЯЕЭГжїСїГЬЃЌЯЕЭГЩЯЕчКѓЃЌЖдЯЕЭГЕФramПеМфКЭИїЯюЭтЩшФЃПщНјааВЮЪ§ЩшЖЈЃЌЖдramЧхСуЃЌНгзХЖдЭтВПi/oКЭplcНјааИДЮЛГѕЪМЛЏЃЌДгeepromжаЖСШЁГѕЪМЕчЛњЕФзЊзгЖЈЮЛаХЯЂЃЌМьВтИпбЙЪЧЗёОЭаїЃЌШчОЭаїПЊЗХИїжжжаЖЯНјШыжїбЛЗЃЌЗёдђвЛжБМьВтИпбЙОЭаїзДЬЌаХЯЂЃЌжБЕНИпбЙОЭаїЃЌжїСїГЬШчЭМ8ЫљЪОЁЃ
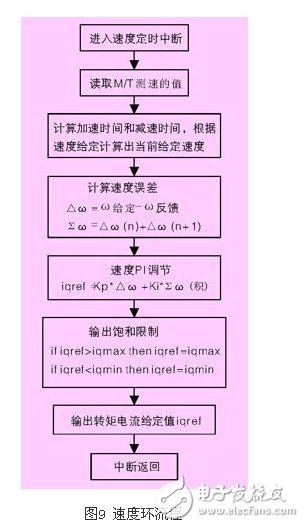
ЫйЖШЛЗгыЕчСїЛЗжаЖЯДІРэЃЌЪЕЪБМрВтЯЕЭГЕФзЊЫйаХЯЂЃЌЫйЖШИјЖЈгЩШЫЛњНчУцЩшжУЪфШыЃЌМьВтЕчЛњЕФдЫзЊзДЬЌКЭМгМѕЫйЪБМфЕФИїЯюВЮЪ§жЕМЦЫуГіЕБЧАЕФЫйЖШИјЖЈЃЌИљОнИјЖЈЫйЖШжИСюгыЫйЖШЗДРЁМЦЫуЮѓВюВЂНјааpidЕїНкЃЌШЛКѓЪфГіiqrefЃЌИљОнЩшЖЈЕФзЊОиЕчСїзюДѓзюаЁжЕЯожЦiqrefжЕЃЌЪфГіiqrefЕНЕчСїЛЗзіЮЊзЊОиЕчСїжИСюЕФИјЖЈЃЌЛєЖћДЋИаЦїМьВтiaЃЌicСНЯрЕчСїЗДРЁжЕЃЌМЦЫуГіШ§ЯрЕчСїЗДРЁжЕЃЌИљОнЮЛжУЫйЖШДЋИаЦїЗДЕФзЊзгЮЛжУМЦЫуЕБЧАзЊзгЕФЮЛжУЕчНЧЖШІШЃЌгЩiaЁЂibЁЂicНјааclarkeЪфГіiІСКЭiІТЃЌгЩiІСЁЂiІТНјааparkБфЛЛЪфГіiqЁЂidЃЌИљОнЫйЖШЛЗЪфГіЕУзЊОиИјЖЈКЭШЅДХЕчСїИјЖЈгыЗДРЁжЕЧѓЮѓВюВЂНјааpiЕїНкЪфГіvqЁЂvdЃЌгЩvqЁЂvdНјааparkФцБфЛЛЪфГіvІСЁЂvІТЃЌгЩvІСЁЂvІТНјааclarkeФцБфЛЛЪфГіvaЁЂvbЁЂvcЃЌЪфГіШ§ЯрvaЁЂvbЁЂvcpwmЕФеМПеБШжЕЕНfpgaЃЛЧ§ЖЏВЈаЮЭЈЙ§fpgaЕФpwmВЈаЮЗЂЩњФЃПщЪфГіЕНЙтЯЫЧ§ЖЏЦїЃЌОЙтЯЫДЋЪфЕНИїИіЙІТЪЕЅдЊФЃПщПижЦigbtЕФПЊЙиЁЃВПЗжСїГЬЃЌШчЭМ9ЫљЪОЁЃ
3 ЪЕбщбщжЄ
ЩЯЪіЕФММЪѕЗНАИОЙ§ВњЦЗЛЏКѓбщжЄећИіЩшМЦЗНАИЪЧПЩааЕФВЂдкВЛЭЌЕФЩшБИЩЯНјааСЫММЪѕВтЪдКЭПМКЫЁЃ
Р§вЛЃКЪдбщЩшБИ6000vЁЂ630kwЁЂ6МЋЕФЭЌВНЕчЛњЃЌдкИУЩшБИЩЯЕУЕНСЫВтЪдбщжЄЃЌећИіЯЕЭГЕФдЫааЦЕТЪЕЭЫйПЩвдДяЕН0.01hzдЫааЃЌИпЫйПЩвдДяЖюЖЈзЊЫйЕФ1.5БЖЦЕТЪдЫааЃЌЕЭЫйзЊОиЬиадЦНЮШЃЌПЩвддЫаадк0hzКузЊОиЃЌећИіЯЕЭГЕФЙІТЪвђЪ§ПЩЕїЃЌШчЭМ10ЃЌЭМ11ЫљЪОЁЃ
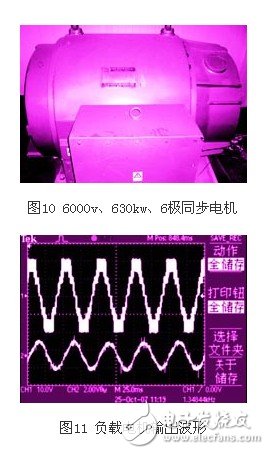
Р§ЖўЃКЪдбщЩшБИ6000vЁЂ630kwЁЂ36МЋЕФЧђФЅЛњЭЌВНЕчЛњЃЌЭМ11ЪЧдкЧђФЅЛњЭЌВНЕчЛњИКдиЩЯзіЪЕбщЕФМЧТМВЈаЮЃЌдкЧђФЅЛњИКдиЪЕбщЙ§ГЬЃЌЯЕЭГдкжидиЧщПіЯТЦєЖЏЃЌБфЦЕЦїЕФЪфГіВЈаЮКмЦНЮШЃЌЯЕЭГЕФЦєЖЏЙ§ГЬОљдШМгЫйЃЌЖјЧвЮоГхЛїЕчСїЁЃДгЭМ12жаПЩвдПДГіЕчСїГЌЧАгкЕчбЙЃЌЯЕЭГдЫаадкЙІТЪвђЪ§ГЌЧАзДЬЌЁЃЖјдРДЕФЧђФЅЛњЭЌВНЕчЛњЦ№ЖЏЙ§ГЬЪЧгУЫЎЕчзшЦєЖЏЃЌГхЛїЕчСїДѓГЌЙ§ЖюЖЈИКдиЕчСїЕФ3БЖЃЌЖдЕчЭјЕФЮЃКІНЯДѓЃЌИФГЩЭЌВНЕчЛњЪИСППижЦБфЦЕЦїКѓгааЇЕФНтОіСЫЦєЖЏдЫааЮЪЬтЁЃЭМ13ЁЂЭМ14ЪОГіСЫЯжГЁЧщОАЁЃ

4 НсЪјгя
БОЮФЯъЯИЕФа№ЪіСЫШчКЮЪЕЯжИпбЙЭЌВНЕчЛњЪИСППижЦБфЦЕЦїЃЌЖдЪИСППижЦдРэзіСЫЯъЯИЕФВћЪіЃЌШчзјБъБфЛЛЁЂЕчСїЛЗПижЦЁЂЫйЖШЛЗПижЦЁЂpwmЯЕЭГЭиЦЫНсЙЙЕШЕШЁЃетжжБфЦЕЦїЕФИїЯюЬиЕудкЪЕМЪИКдиЩЯЭЈЙ§СЫЪдбщбщжЄЁЃ
ЯрЙидФЖС
- жаЙњЕквЛИпТЅбЁдёЕЄЗ№ЫЙ2017-03-13
- ЕЄТѓзюДѓЙЄвЕМЏЭХЕЄЗ№ЫЙжњЭЦжаЙњЪЕЯжТЬЩЋзЊаЭ2017-05-16
- ЮвЙњБфЦЕЦїЦѓвЕИУШчКЮЦЦБљ?2017-03-13
- ХЗУЫХњзМжаЙњЙњМвЕчЭјЪеЙКЯЃРАЪфБфЕчЙЋЫО24%ЙЩШЈ2017-05-16
- БфЦЕЦїдѕбљЪЙгУзюЪЁЕч?2017-03-13
- ШЋЧђЪзИіЁАвЛДјвЛТЗЁБФмдДЕчСІЙњМЪШЫВХХрбјЛљЕидкЩЯКЃГЩСЂ2017-05-16